8��26�����������ѧ����־�ӿ�����ѧ����е��ѧ����Science Robotics������������������еѧԺ�о��Ŷ���Ϊ��Tensegrity metamaterials for soft robotics���������������ģ�Focus article�����������Ķ���������ṹ�����������е�˵������о�ϣ������������������������еѧԺ��������Ϊ���ĵ�һ��ͨѶ�����������ϣ�ؽ�����Խ���˲�ʿ���˷�Ϊ���ĵ���������������
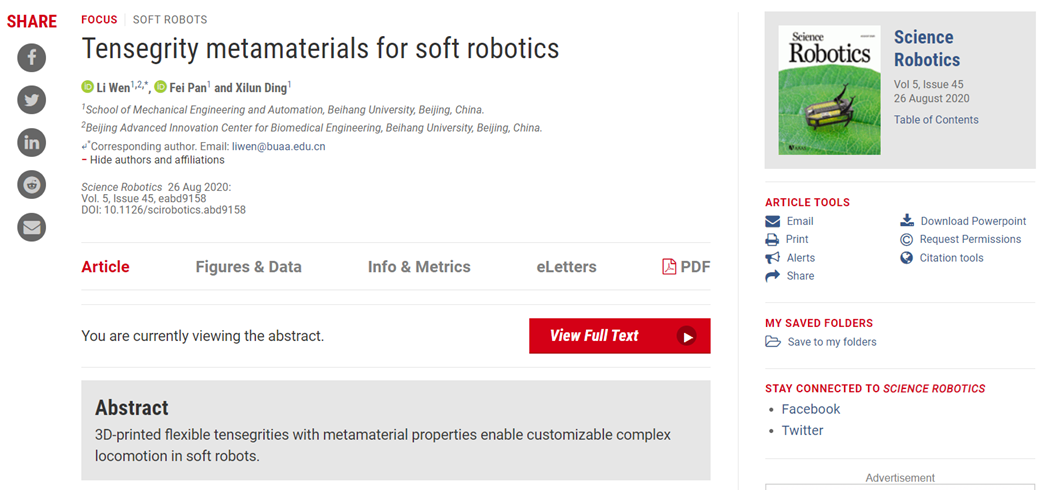
ͼһ ��е���̼��Զ���ѧԺ�о��Ŷ��ڡ���ѧ����е��ѧ����־������������
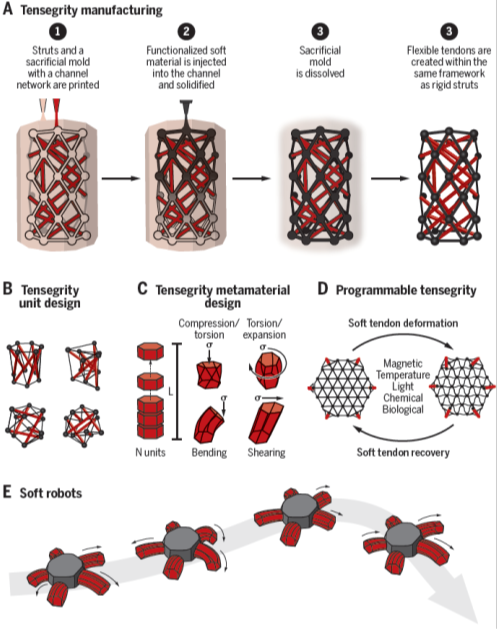
ͼ���� ���������������е��
�Դ�20����60���°Ϳ���˹�ء����գ�Buckminster Fuller�������ˡ���������ṹ����������������ѷ�����������ṹ�ձ鱣����ϸ���Ǽܡ�����-����ϵͳ���������������������ԭ��Ӧ�����������ܡ��ռ�̽��ȹ��̽ṹ�������������������������ṹ���и��Ტ�á�����а�ԡ���³���Ե�����������ڻ�е������Ӧ��Զ�������������е���������Ϊһ��ģ�����ﲢ�������徲���������ͻ�е��������ǽ�������е��ѧ����ѧ������ѧ�ȶ�ѧ�ƽ�֯������о�����֮һ������Ȼ��Ҫ��ʵ���������������˶���аȷ���������ظ�Ч��˳Ӧ����Ѹ�ٵ��ش�������Ч����������е�������Ϻͽṹ��Ʒ��滹���ٺܴ���ս�������ɸա���ṹ�����ɵ���������ṹ����һ���µ�ͻ�Ƶ�������Ȼ�����������ʵ����������ṹ�Ŀ����������������ʹ����������ṹ��ǿ�����е�˻�е���ܵ������д����������
��Դ�����������о��Ŷӻ��ײ������˹Ű����������ṹ�����������������Science Robotics���ڱ�����һ���µ���������ṹ�ӹ�Ҫ����������Ҫ����Կ�����ɴ��������Ϻ��Ը˼���һ�廯����������������ڼӹ�����ѹŤ/��Ť����ѧ���ܿɱ�̵���������������ṹ��ѧ�����������Ӧ���������е����� ( https://doi.org/10.1126/scirobotics.aay9024)�����������������ֳ����ϵ������е���ڴų����������¿�ʵ�ַ��ڡ��������еȶ����˶�ģʽ�������о��Ŷ���Ϊ��һ�廯����Ҫ���ֳɵؽ���Ч�����������������ĸ��Ը˿������õؼ�����һ�������Ϊ�������������ϵĿɱ����������ṹ�ṩ�˿���Ҫ��������
ͬʱ������о��Ŷ�չ������������ṹ�����������е�˵��о�ƫ����δ��Զ�����������ڳ���������������Ϊ�������ϡ����Խṹ�����Ի������ṩ��������ƿռ����������ܹ�����ؿ������е�������������Ρ���ѧ���ܵ��صȷ���������������о��Ŷ���Ϊ���������ѧ�ṹ��Ʒ����������������ṹ�����Ͽ���Ϊ���������Ժ��㷨�Ե����Խṹ�����ƽ�辶�����δ����Ӧ�ý�һ�������Զ����ѧ����Ϊ����������ģ��������Լ���ϵ��еѧϰ��Ҫ����������ģ��������������������е�˵��ش���ζ����������������������������������Ͽ�����ǿ��е�˵���а�Ժ�˳Ӧ�������δ���������ڹ⡢�ȡ���ѧ����ʽ�ϼ���̽����Ϊ�ձ����������������������ϵ��ѧ�ƽ�֯�������������ṹ����������ΪӦ�������﹤�̡���̽��̽��ҽ��Ч�͵�����Ļ�е�������ṩ�����˼�������������
������Ϣ��Li Wen, Fei Pan, and Xilun Ding, Tensegrity Metamaterials for Soft Robotics, Science Robotics, 5, eabd9158, 2020.
�������ӣ�https://robotics.sciencemag.org/content/5/45/eabd9158
���壺��е���̼��Զ���ѧԺ
�༭���Ų��� ��ƣ���껾�
�������
��Ʒ���Ż���վ�ܱ��ܼ�������
Ͷ�壺geoos@buaa.edu.cn