8ФВ26ИХ���Ј¬Ў¶ҝЖС§Ў·ФУЦҫЧУҝҜЎ¶ҝЖС§ЎӨ»ъРөИЛС§Ў·ЈЁScience RoboticsЈ©ҝҜөЗБЛОТР����Ј»ъРөС§ФәСРҫҝНЕ¶УМвОӘЎ°Tensegrity metamaterials for soft roboticsЎұөДМШСыЖАКцВЫОДЈЁFocus articleЈ©�ЎЈВЫОД¶ФХЕАӯХыМеҪб№№і¬ЦКБПИнМе»ъРөИЛөДЧоРВСРҫҝПЈНыҫЩРРБЛЖАКц�Ў����Ј»ъРөС§ФәОДБҰҪМКЪОӘұҫОДөЪТ»јжНЁС¶ЧчХЯ���Ј¬¶ЎПЈВШҪМКЪУлЧҝФҪ°ЩИЛІ©КҝәуЕЛ·ЙОӘұҫОДөДЕдПаЦъХЯ�ЎЈ
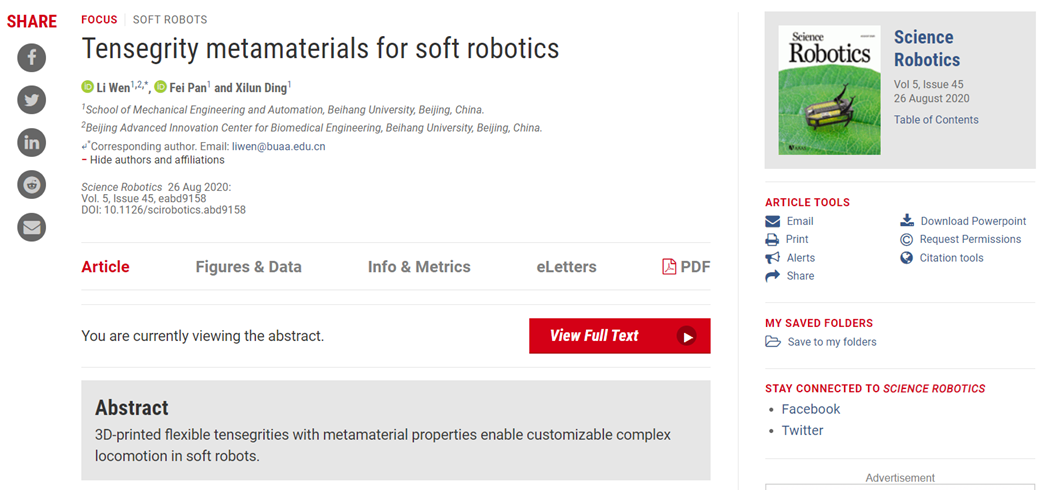
НјТ» »ъРө№ӨіМј°ЧФ¶Ҝ»ҜС§ФәСРҫҝНЕ¶УФЪЎ¶ҝЖС§ЎӨ»ъРөИЛС§Ў·ФУЦҫҪТПюЖАКцОДХВ
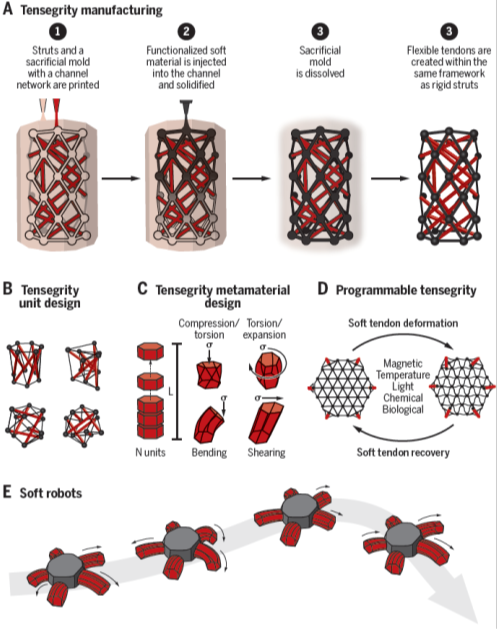
Нј¶юЎў ХЕАӯі¬ЦКБПИнМе»ъРөИЛ
ЧФҙУ20КАјН60ДкФВ°НҝЛГфЛ№МШЎӨё»АХЈЁBuckminster FullerЈ©·ўГчБЛЎ°ХЕАӯХыМеҪб№№ЎұТФАҙ���Ј¬ИЛАаТС·ўГчХЕБҰХыМеҪб№№ЖХұйұЈҙжУЪПё°ы№ЗјЬЎўјЎИв-№ЗчАПөНіөИЙъОпМеЦР���Ј¬ІўЦрІҪҪ«ЖдФӯАнУҰУГУЪРЮҪЁЎўөсЛЬЎўҝХјдМҪІвөИ№ӨіМҪб№№Ул»ъ№№ЦР�ЎЈУЙУЪХЕАӯХыМеҪб№№ҫЯУРёХИбІўјГЎўёЯОЮР°РФЎўёЯВі°фРФөИУЕКЖ���Ј¬ФЪ»ъРөИЛБмУтј«ҫЯУҰУГФ¶ҫ°�ЎЈИнМе»ъРөИЛ���Ј¬ЧчОӘТ»ЦЦДЈДвЙъОпІўДЬУлИЛЗеҫІҪ»»ҘөДРВРН»ъРөИЛ���Ј¬КЗҪьДкАҙ»ъРөИЛС§ЎўБҰС§ЎўЦКБПС§өИ¶аС§ҝЖҪ»ЦҜБмУтөДСРҫҝИИГЕЦ®Т»�ЎЈИ»¶шТӘПлКөПЦДЬжЗГАЙъОпМеФЛ¶ҜОЮР°ЧјИ·ЎўФвКЬНвФШёЯР§ЎўЛіУҰЗйРОСёЛЩөИЦШҙуМШХчәН№ҰР§���Ј¬ИнМе»ъРөИЛФЪЦКБПәНҪб№№ЙијЖ·ҪГж»№ГжБЩәЬҙуМфХҪ�ЎЈУЙёХЎўИбҪб№№ЕдәПЧйіЙөДХЕАӯХыМеҪб№№ҫНКЗТ»ёцРВөДН»ЖЖөг�ЎЈИ»¶ш���Ј¬ФхСщКөПЦХЕАӯХыМеҪб№№өДҝмЛЩЦЖФм���Ј¬ФхСщК№УГХЕАӯХыМеҪб№№ФцЗҝИнМе»ъРөИЛ»ъРөРФДЬөИОКМвЙРҙэҪвҫц�ЎЈ
Хл¶ФҙЛОКМв���Ј¬СРҫҝНЕ¶У»ШКЧІўЖКОцБЛ№Е°еөДХЕАӯХыМеҪб№№���Ј¬ІўЧЕЦШПИИЭБЛScience RoboticsҪьЖЪұЁөАөДТ»ЦЦРВөДХЕАӯХыМеҪб№№јУ№ӨТӘБм�ЎЈёГТӘБмҝЙТФҝмЛЩНкіЙҙЕРФИнЦКБПәНёХРФёЛјюөДТ»Ме»ҜЦЖФм���Ј¬ІўҝЙУГУЪјУ№ӨҫЯУРС№ЕӨ/АӯЕӨЎўБҰС§РФДЬҝЙұаіМөИМШХчөДХЕАӯХыМеҪб№№БҰС§і¬ЦКБП���Ј¬УҰУГУЪИнМе»ъРөИЛЙијЖ ( https://doi.org/10.1126/scirobotics.aay9024)�Ў����Ј»щУЪХвЦЦі¬ЦКБПөДИнМе»ъРөИЛФЪҙЕіЎ»төз»ъЗэ¶ҜПВҝЙКөПЦ·ӯМЪЎў¶ЁПтЕАРРөИ¶аЦЦФЛ¶ҜДЈКҪ�ЎЈСРҫҝНЕ¶УТФОӘёГТ»Ме»ҜЦЖФмТӘБмАЦіЙөШҪ«№ҰР§»ҜИнЦКБПНшВзәНБжШкөДёХРФёЛҝмЛЩУРУГөШјҜіЙФЪТ»Жр���Ј¬ОӘЦЖФм¶аұкЧјЎў¶аЦКБПөДҝЙұаіМХЕАӯХыМеҪб№№МṩБЛҝЙРРТӘБм�ЎЈ
Н¬Кұ���Ј¬СРҫҝНЕ¶УХ№НыБЛХЕАӯХыМеҪб№№і¬ЦКБПИнМе»ъРөИЛөДСРҫҝЖ«ПтУлОҙАҙФ¶ҫ°�ЎЈУЙУЪі¬ЦКБПЙијЖАнДоҝЙТФОӘИбРФЧУБПЎўИбРФҪб№№ЎўИбРФ»ъ№№өИМṩБЙА«өДЙијЖҝХјд���Ј¬ТтҙЛДЬ№»ҙуҙуНШҝнИнМе»ъРөИЛФЪЗэ¶ҜЎўұдРОЎўБҰС§РФДЬөчҝШөИ·ҪГжөДДЬБҰ�ЎЈСРҫҝНЕ¶УТФОӘ���Ј¬ФЪБҰС§Ҫб№№ЙијЖ·ҪГж���Ј¬ХЕАӯХыМеҪб№№і¬ЦКБПҝЙТФОӘёьҫЯЖКОцРФәНЛг·ЁРФөДИбРФҪб№№ЙијЖЖМЖҪхиҫ¶���Ј¬ОҙАҙ»№УҰёГҪшТ»ІҪЙъіӨТФ¶аұкЧјБҰС§ЖКОцОӘҙъұнөДАнВЫДЈЧУ���Ј¬ТФј°Б¬Пө»ъРөС§П°өИТӘБмөДЕМЛг·ВХжДЈЧУ���Ј¬Ҫш¶шЦъНЖИнМе»ъРөИЛөДЦШҙуұдРО¶ЁЦЖЙијЖ�ЎЈФЪЗэ¶Ҝ·ҪГж���Ј¬ЦЗДЬЦКБПҝЙТФФцЗҝ»ъРөИЛөДОЮР°РФәНЛіУҰРФ���Ј¬ОҙАҙ»№ҝЙТФФЪ№вЎўИИЎў»ҜС§өИРОКҪЙПјМРшМҪЛчёьОӘЖХұйөДОЮАВЗэ¶Ҝ·Ҫ·Ё�ЎЈБ¬Пө¶аС§ҝЖҪ»ЦҜ���Ј¬ХЕАӯХыМеҪб№№і¬ЦКБПУРНыОӘУҰУГУЪЙъОп№ӨіМЎўҝұМҪҝұМҪЎўТҪБЖР§АНөИБмУтөД»ъРөИЛЙъіӨМṩёь¶аөДЛјРчәНБйёР�ЎЈ
ВЫОДРЕПўЈәLi Wen, Fei Pan, and Xilun Ding, Tensegrity Metamaterials for Soft Robotics, Science Robotics, 5, eabd9158, 2020.
ВЫОДБҙҪУЈәhttps://robotics.sciencemag.org/content/5/45/eabd9158
№©ёеЈә»ъРө№ӨіМј°ЧФ¶Ҝ»ҜС§Фә
ұајӯЈәХЕІ©Су ЙијЖЈәОдк»ҫІ
ұаЙуЈәсыйӘ
іцЖ·ЈәГЕ»§НшХҫЧЬұаЧЬјаКВЗйКТ
Н¶ёеЈәgeoos@buaa.edu.cn